
Dijkstra는 대표적인 길찾기 알고리즘입니다.
Dijkstra 알고리즘을 이용하여 출발 노드에서 종말 노드로 가는 최단 거리(최소 비용)의 경로를 찾을 수 있습니다.
아래와 같은 그래프를 생각해봅시다.
 |
| 그래프 |
B에서 출발해 E에 도착하는 경로는 여러개가 있습니다.
여러개의 경로 중에서 최소 비용을 가지는 경로가 우리가 원하는 경로가 될것입니다.
노드에서 노드 사이를 옮겨다닐때 비용이 발생한다고 하면
경로의 비용은 $Cost(path) = \sum\limits_{i=1}^n Cost(edge),\text{ }(edge_1,edge_2...edge_n은\text{ }path에\text{ }속함)$이 됩니다.
$edge$가 노드와 노드를 연결하니 $edge$에 비용을 추가하면 아래와 같이 됩니다.
 |
| cost 추가 |
그럼 이제 경로를 구성하는 $edge$를 구하면 됩니다.
방문한 노드들을 트리 형식으로 구축하여 경로를 구성하는 $edge$들을 구할 수 있습니다.
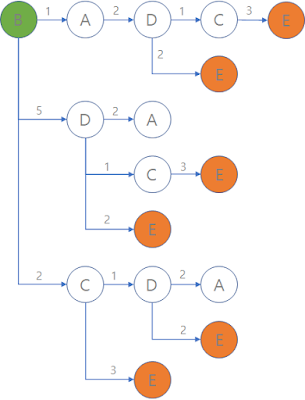 |
| B-E 경로들 |
B에서 출발해 E에 도달하는 총 6개의 경로를 구할 수 있습니다.
(주의: 진행 중인 경로에 속한 노드를 재방문할 수 없습니다. 그렇지 않으면 무한루프에 빠지게 됩니다.)
경로들에 대한 비용을 계산해 보면,
$\begin{eqnarray} B\to A\to D\to C\to E &= 9 \\ B\to A\to D\to E &= 6 \\ B\to D\to C\to E &= 10 \\ B\to D\to E &= 7 \\ B\to C\to D\to E &= 5 \\ B\to C\to E &= 6 \end{eqnarray}$
$B\to C \to D \to E$가 최소 비용 거리임을 확인 할 수 있습니다.
 |
| 최소 비용 거리 |
그래서 제가 앞에서 최단 거리와 최소 비용를 혼용한 이유이기도 합니다.
$Cost(edge)$ 함수를 다항식으로 두면 다양한 조건들을 반영할 수 있는 비용 함수를 만들 수 있습니다.
예를 들면 아래 비용 함수는 거리과 edge의 방향이 바뀌었을때의 비용 함수입니다.
$$Cost(edge)=length + turning\text{ }point$$
이 비용 함수를 이용해서 $edge$의 방향이 최소로 바뀌는 경로를 구할 수 있습니다.
여기서 추가적으로 자동차 내비게이션처럼 경유 경로를 적용하는 것에 대해 알아 봅시다.
위의 예에서 A를 경유해서 지나가야 한다면

로 표현할 수 있습니다.
B에서 출발하여 A에 도착하는 최소 비용 경로와 A에서 출발하여 E에 도착하는 최소 비용 경로를 합하면 B에서 출발하여 E에 도착하는 최소 비용 경로와 같습니다.
과연 그럴까요? 확인해봅시다.
$B\to A$의 두 경로 ${B\to A}, {(B\to A)}^{'} $가 있으면 $B\to E$의 비용은 아래와 같이 표현됩니다.
$$
\begin{eqnarray} \begin{aligned} Cost(B\to E) &= Cost(B\to A) + Cost(A\to E) \\
&= Cost({(B\to A)}^{'}) + Cost(A\to E) \end{aligned} \end{eqnarray}
$$
두 식에서 두번째 항의 최소 비용은 동일하기 때문에 전체 식에서 최소 비용이 되기 위해서는 첫번째 항이 최소 비용이 되어야 합니다.
따라서 $B\to A$의 최소 비용과 $A\to E$의 최소 비용의 합이 전체 경로의 최소 비용이 됩니다.
마지막으로 $A$를 회피해서 가야한다면 어떻게 하면 될까요?
간단하게 $A$로 접근 가능한 $edge$를 비활성화 시키면 됩니다.

$A$에 도달할 수 있는 $edge$가 없기 때문에 $A$를 회피하게 됩니다.
댓글
댓글 쓰기